Intrinsic Camera Calibration
Intrinsic Parameters
From the 3D coordinates in the camera frame to the 2D image plane via projection.
Ideal Perspective Projection
Real Intrinsic parameters
- "Pixels" are in some arbitrary spatial units, maybe pixels are note square
We don't know the origin of our camera pixel coordinates
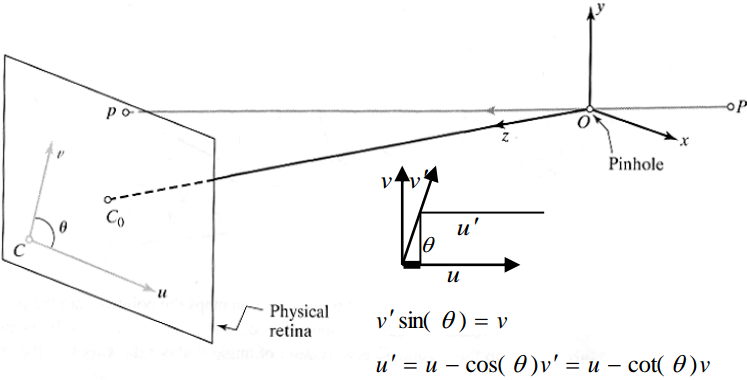
Maybe skew between camera pixel axes
Intrinsic Parameters, Homogeneous coords
: Pixels, : Camera 3D coordinates
5 DOF
where
- focal length, - skew, - aspect ratio, - offset
If square pixels, no skew, and optical center is in the center
Only 1 DOF